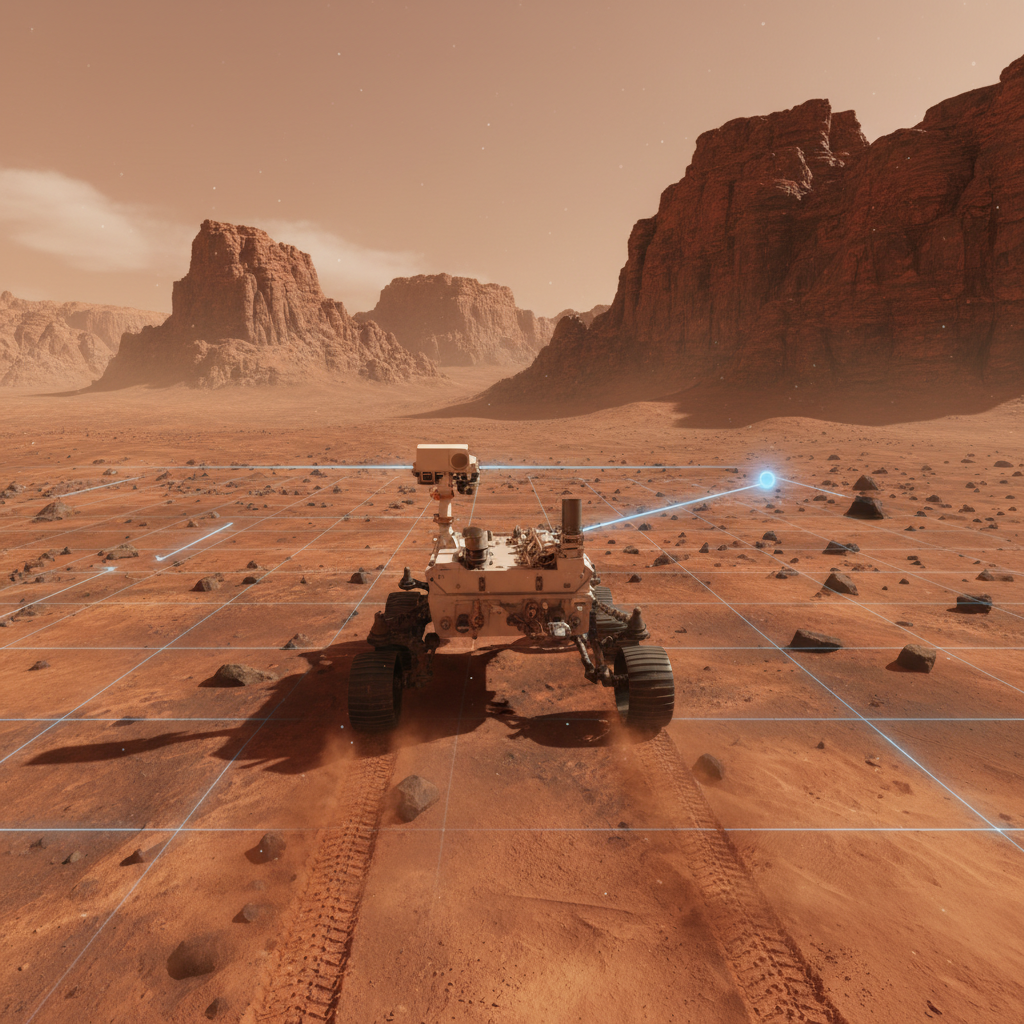
For første gang i rumforskningens historie har en AI-sprogmodel planlagt en Mars-rovers kørerute. NASAs Perseverance-rover gennemførte i december 2025 to kørsler på i alt 456 meter, hvor ruterne var planlagt af Anthropics Claude – ikke af menneskelige roverpiloter på Jet Propulsion Laboratory (JPL). Det er et konkret gennembrud, der viser, at store sprogmodeller kan løse opgaver langt ud over tekstgenerering.
Hvordan Claude planlagde ruten
Normalt sidder et team af specialister på JPLs Rover Operations Center og planlægger Perseverances kørsler manuelt. De analyserer orbitalbilleder fra HiRISE-kameraet på Mars Reconnaissance Orbiter, digitale højdemodeller og terrændata for at identificere sikre ruter. Det er en tidskrævende proces, der typisk tager timer eller endda dage for en enkelt kørsel.
I samarbejdet mellem JPL og Anthropic fik Claude adgang til de samme datasæt, som menneskelige planlæggere bruger. Sprogmodellen analyserede HiRISE-billederne med sine vision-kapaciteter og identificerede farlige terræntyper: sandrippler, stenfelter, grundfjeld og klippeudhæng. Derefter genererede Claude en rute defineret af waypoints med ti meters mellemrum, som roveren kunne følge.
Det interessante er processen: Claude byggede ruten punkt for punkt, evaluerede derefter sit eget arbejde, kritiserede placeringen af waypoints og foreslog justeringer. Denne iterative selvkorrektion minder om den refleksive tænkning, vi ser i nyere reasoning-modeller som GPT-5.5 og Claude Opus 4.7, men her anvendt på en fysisk navigationsopgave 225 millioner kilometer fra Jorden.
456 meter uden menneskelig indgriben
Den 8. december 2025 (sol 1707 i missionen) kørte Perseverance 210 meter efter Claudes plan. To dage senere, den 10. december (sol 1709), fulgte endnu en tur på 246 meter. Sammenlagt 456 meter planlagt af en sprogmodel.
Før kommandoerne blev sendt til Mars, gennemgik de JPLs “digitale tvilling” – en virtuel kopi af roveren, der simulerer over 500.000 variabler for at verificere, at kommandoerne er sikre. Da ingeniørerne gennemgik Claudes planer, fandt de kun behov for mindre justeringer. Grundlæggende var AI-planen på niveau med det, menneskelige eksperter ville have produceret.
Vandi Verma, rumrobotiker på Perseverance-teamet, udtalte: “De grundlæggende elementer i generativ AI viser stor lovende potentiale for at strømline søjlerne i autonom navigation.” Matt Wallace, chef for JPLs Exploration Systems Office, gik endnu videre: “Det er den banebrydende teknologi, vi har brug for til at etablere infrastruktur for permanent tilstedeværelse på Månen og udforskning af Mars.”
Mere end en demo: praktiske konsekvenser
Ingeniørerne på JPL vurderer, at AI-planlagt navigation kan halvere den tid, det tager at planlægge kørsler. Det lyder måske ikke dramatisk, men for en mission som Perseverance, hvor hvert minut med planlægning er et minut uden videnskabelig dataindsamling, er det betydeligt. Kommunikationsforsinkelsen mellem Jorden og Mars (op til 24 minutter én vej) gør det umuligt at fjernstyre roveren i realtid. Jo mere autonomi roveren har, jo mere videnskab kan den udføre.
Perspektiverne rækker længere end Mars. Fremtidige missioner til Titan, Europa eller asteroider vil have endnu længere kommunikationstider. En rover eller sonde, der kan navigere selvstændigt ved hjælp af en sprogmodel, åbner for missioner, der i dag er logistisk umulige. Det handler ikke om at erstatte menneskelige planlæggere, men om at give dem et værktøj, der kan håndtere rutineopgaverne, så de kan fokusere på de videnskabeligt interessante beslutninger.
Hvad det fortæller om sprogmodellers fremtid
For os, der arbejder med AI og softwareudvikling, er Mars-eksperimentet en påmindelse om, at sprogmodellernes anvendelsesområde vokser hurtigt. Claude analyserede ikke bare tekst – den fortolkede satellitbilleder, vurderede geologiske risici og genererede præcise navigationskommandoer. Det er multimodal AI i praksis, ikke som et benchmark-resultat, men som en applikation med reelle konsekvenser.
Det er også værd at bemærke den strenge verifikationsproces. JPL sendte ikke blindt Claudes output til en rover til 2,4 milliarder dollar. Hver waypoint blev simuleret, valideret og gennemgået af mennesker. Det er præcis den tilgang, vi bør tage til AI i kritiske systemer: brug modellen til at accelerere arbejdet, men bevar menneskelig kontrol over de endelige beslutninger. Med investeringer på over 40 milliarder dollar i Anthropic fra Google alene er det tydeligt, at industrien satser tungt på denne type kapaciteter.
Eksperimentet viser samtidig, at grænsen mellem “sprogmodel” og “autonomt beslutningssystem” bliver stadig mere flydende. Når en LLM kan planlægge en rovers rute på en anden planet, er det svært at fastholde narrativet om, at disse modeller bare forudsiger det næste ord.
Kilder
- NASA’s Perseverance Rover Completes First AI-Planned Drive on Mars – NASA JPL, januar 2026
- NASA’s Perseverance Rover Takes AI-Driven Roadtrip on Mars – IEEE Spectrum, 2026
- Claude AI Powers First AI-Planned Mars Rover Drive – Anthropic, 2026
Denne artikel er skrevet i samarbejde med AI, og efterfølgende redigeret af et rigtigt menneske 🙂